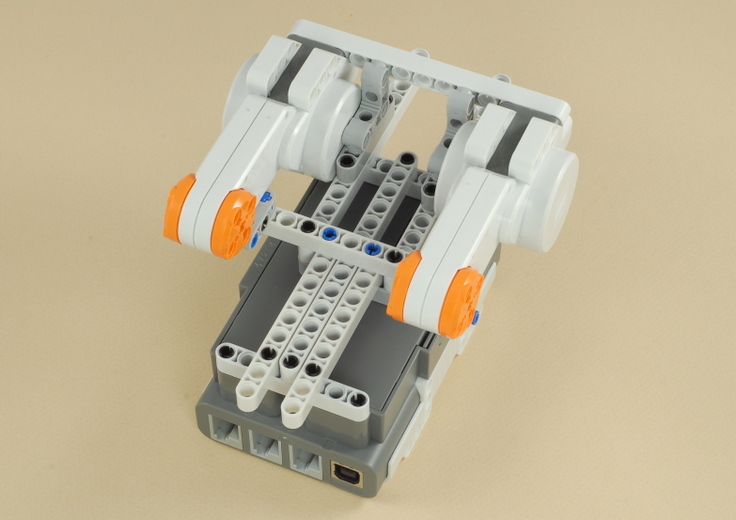
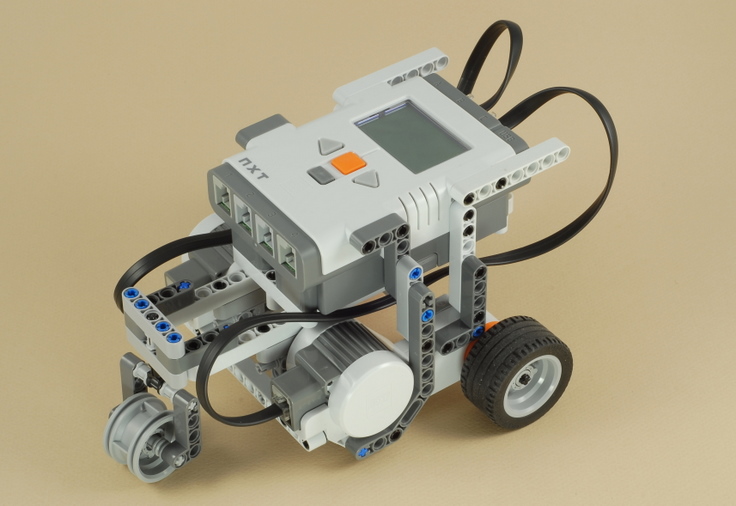
Конструирование робота
Пошаговая инструкция
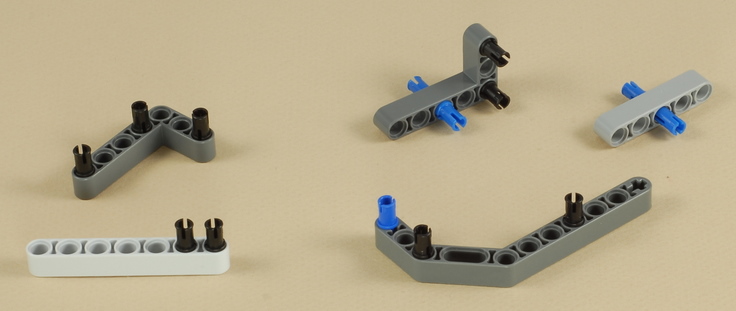
1


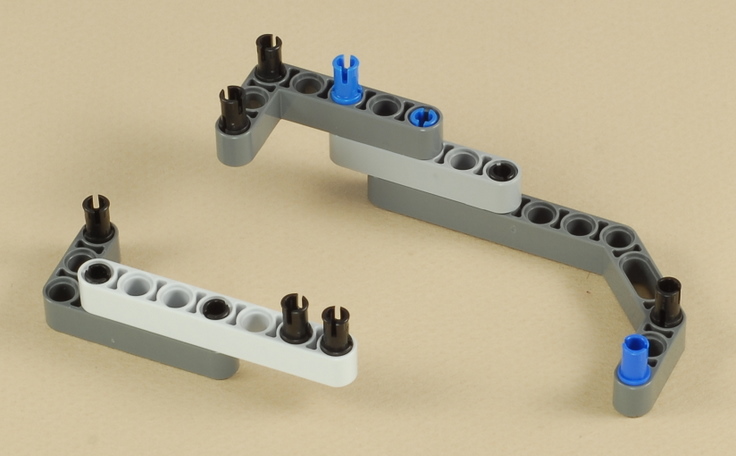
2
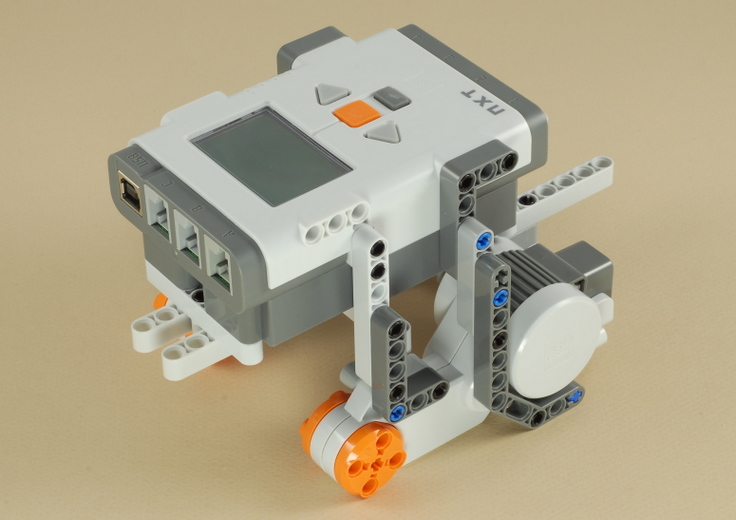
3
Важное замечание:Следуйте на шаг 3-АА при использовании батареи типа АА, или шаг 3-Li при использовании литиевой NXT аккумуляторной батареи.
  |
 |
3-AA |
  |
|
3-Li |
3-AA (ТОЛЬКО при использовании батерей типа AA)

3-Li (ТОЛЬКО при использовании литиевого аккумулаторного блока)

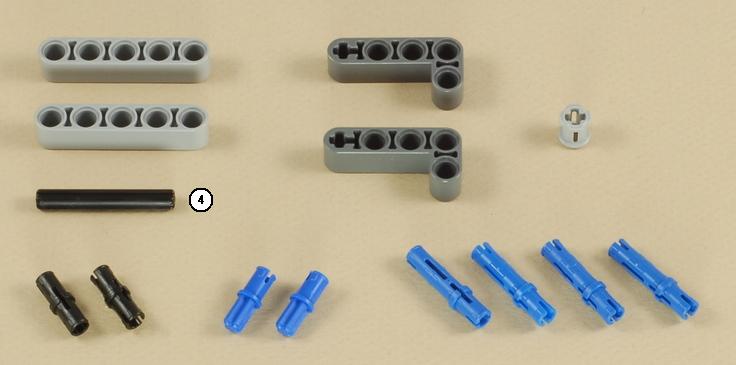
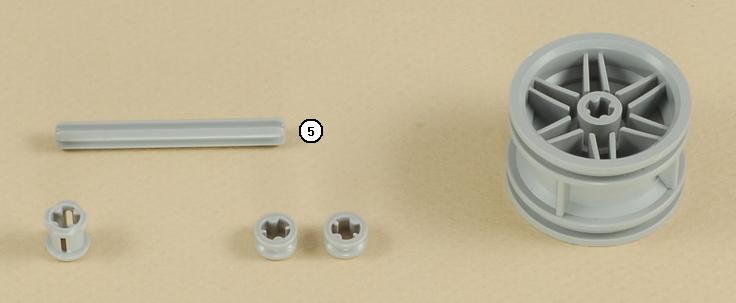
5
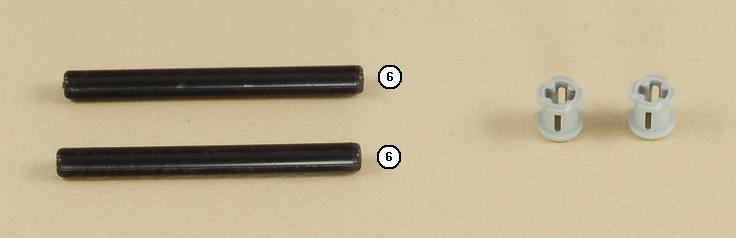
6
7

8
9

 |
 |
10
11

|
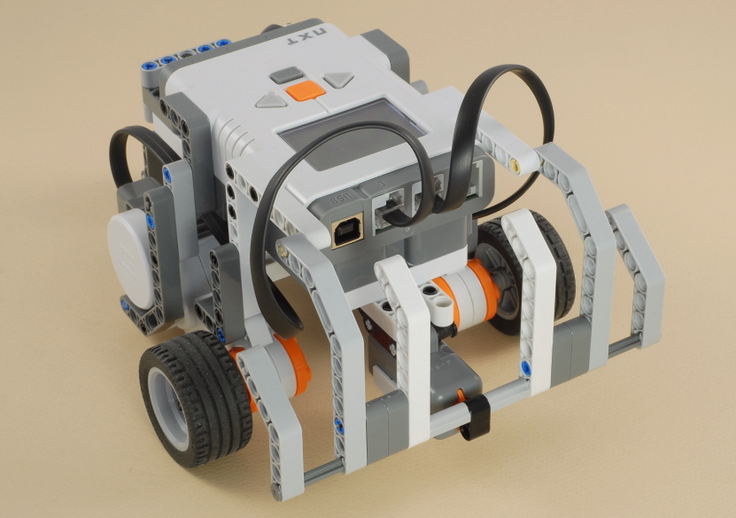
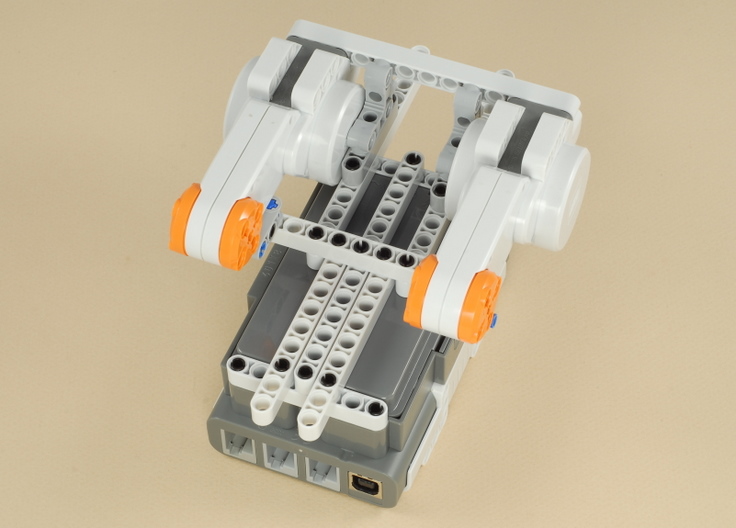
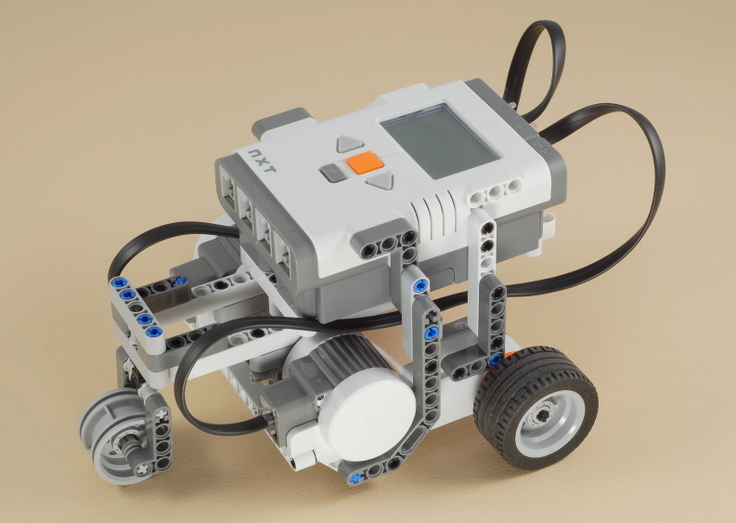
Используйте два провода средней длины для подключения двух серводвигателей к портам B и C контроллера NXT. Важно: левый провод пропускайте по левой стороне, а правый провод по правый (не пересекайте провода). |
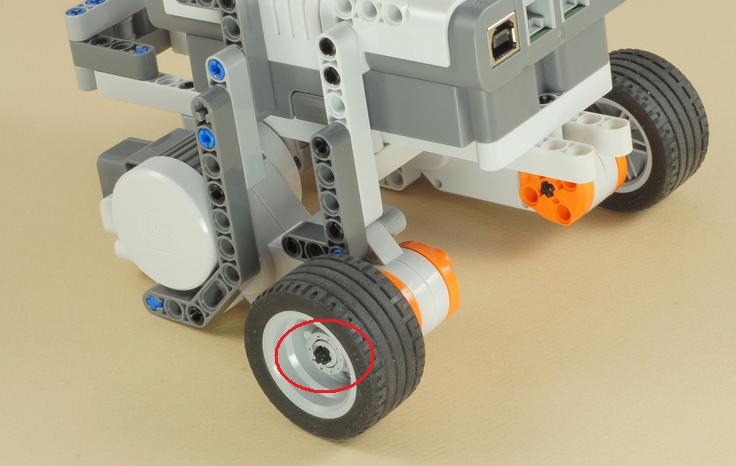
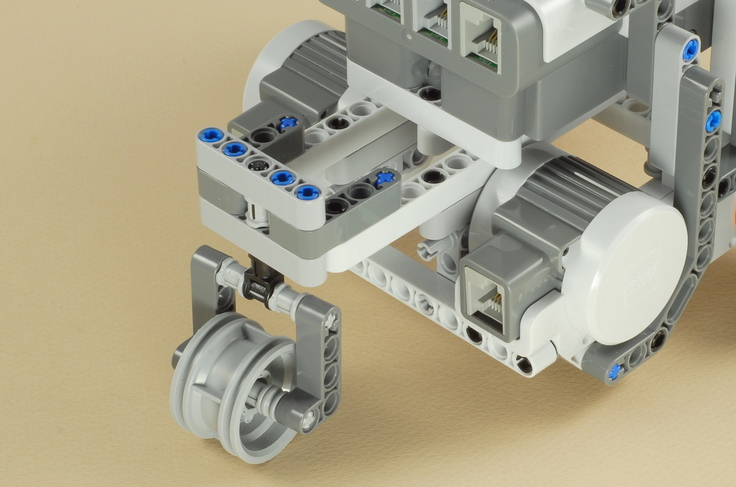
Совет по строительству: Балансируйте вес!
При создании трёхколёсного робота, важно учитывать весовой баланс робота. Если Вы хотите хорошую поворачиваемость, то большая часть веса робота по-возможности должна быть над ведущими колесами. Не часть веса должна оставаться и на третьем колесе чтобы робот не опрокидывался.
Если больший вес у третьего колеса, робот может опрокинуться или ведущие колеса могут начать проскальзывать. Однако, если слишком большой вес попадает на ведущие колеса, то при движении назад робот может неожиданное... опрокинуться назад!
12

13
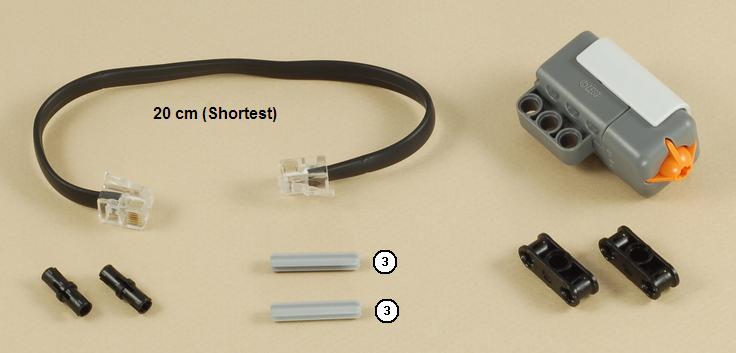


Присоедините кабель от датчик нажатия в порт № 1 блока NXT.

14

Важно: Убедитесь, что провода не прикосаются к бамперу внедорожника.